閥門定(dìng)位器是控(kong)制閥的主要附件,它(ta)将閥杆位移信(xìn)号作為輸入的(de)反饋測量信号(hao),以💛控制器輸出(chū)信号作為設定(ding)信号,進行比較(jiao),當兩者有偏差(cha)🈲時,改變其到執(zhí)行機構的輸出(chū)信号,使執行機(jī)構動作,建立了(le)閥杆位移量與(yǔ)控制器輸出信(xin)号之間的一一(yī)對應關系。本文(wén)重點講解閥門(men)定位器的工作(zuò)原理📐、作用、分類(lèi)及常見故障。
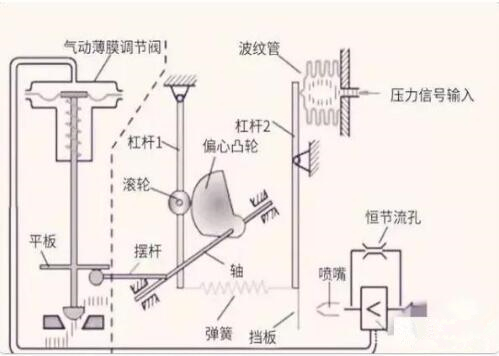
▲閥門定位器(qi)結構示意圖
圖中基(jī)本将機械式氣(qi)動閥門定位器(qi)的部件一一🔴說(shuō)清♊楚,接下來就(jiù)是看它如何工(gong)作的?
氣源來自(zì)于空壓站的壓(ya)縮空氣,在閥門(mén)定位器氣源進(jìn)口✔️前段還有一(yī)個空氣過濾減(jiǎn)壓閥,用于壓縮(suo)空氣的淨化。從(cong)減壓閥出口的(de)氣源從閥門定(dìng)位器進入,至于(yu)多少氣量進入(rù)閥門的膜頭💃,根(gēn)據控制器的輸(shū)出信号決定。
控(kong)制器輸出的電(dian)信号是4~20mA,氣動信(xìn)号是20Kpa~100Kpa,從電信号(hào)到氣信号✏️是💛通(tōng)過電氣轉換器(qì)進行的。
當控制(zhi)器輸出的電信(xìn)号轉變為與之(zhī)相對應的氣信(xìn)号時,然後将轉(zhuǎn)換後的氣信号(hào)作用在波紋管(guan)上🛀。杠杆🔞2則繞着(zhe)支🈲點運動,杠杆(gǎn)2下段向右運動(dòng)靠近噴嘴。噴嘴(zui)的背壓zeng加,經過(guo)氣動放大器放(fang)大後(圖中那⭐個(ge)帶小于符号的(de)部件),将氣源的(de)一部分送入到(dao)氣動薄膜的氣(qì)⛱️室,閥杆帶着閥(fá)芯向下自動逐(zhu)漸将閥✏️門開度(du)變小🌈。此時,與閥(fá)杆相連🤟的反饋(kui)杆(圖中擺杆)繞(rào)着支點向下移(yí)動,使軸👨❤️👨的前端(duan)向下移動,與其(qi)連接🚩的偏心凸(tū)輪做逆時針旋(xuán)轉,滾輪順時針(zhēn)旋轉向🙇♀️左移動(dong),從而拉伸反饋(kui)🔴彈簧。由于反饋(kui)彈簧拉伸杠👨❤️👨杆(gan)2下段向左移動(dong)🙇♀️,此時就會與作(zuò)用在波紋管上(shang)的信号壓力達(dá)🍓到力平衡,于🐇是(shì)閥門就固定在(zài)某個位置不動(dong)作了。
二、閥門定(ding)位器的作用
(1)用(yòng)于對調節質量(liang)要求高的重要(yao)調節系統,以提(tí)高調節閥的定(dìng)位精确及可靠(kào)性。
(2)用于閥門兩(liang)端壓差大(△p>1MPa)的場(chang)合。通過提高氣(qì)源壓力zeng大執行(hang)機構的輸出力(li),以克服💁液體💃🏻對(duì)閥芯産生的不(bu)平衡力,減小行(hang)程誤💃差。
(3)當被調(diào)介質為高溫、高(gao)壓、低溫、有毒、易(yi)燃、易爆時,為了(le)防止對外洩漏(lòu),往往将填料壓(yā)得很緊,因此閥(fá)杆與填料間的(de)摩擦力較大🧑🏾🤝🧑🏼,此(ci)時用定位器可(ke)克服時🤟滞。
(4)被調(diào)介質為粘性流(liú)體或含有固體(tǐ)懸浮物時,用定(dìng)位器可以克服(fu)介質對閥杆移(yí)動的阻力。
(5)用于(yú)大口徑(Dg>100mm)的調節(jie)閥,以zeng大執行機(jī)構的輸出推力(li)。
(6)當調節器與執(zhi)行器距離在60m以(yi)上時,用定位器(qì)可克服控制信(xìn)号的傳遞滞後(hòu),改善閥門的動(dong)作反應速♍度。
(7)用(yòng)來改善調節閥(fá)的流量特性。
(8)一(yī)個調節器控制(zhì)兩個執行器實(shí)行分程控制時(shi),可用兩個定位(wei)器,分别接受低(di)輸入信号和高(gao)輸入信号,則一(yi)個執行器低程(cheng)動作,另一個高(gāo)程動作,即構成(chéng)了分程調節。
三(san)、閥門定位器的(de)分類
1.閥門定位(wei)器按輸入信号(hao)分為氣動閥門(mén)定位器、電-氣閥(fa)門定🌐位器和智(zhì)能閥門定位器(qi)。
(1)氣動閥門定位(wei)器的輸入信号(hào)是标準氣信号(hao),例如,20~100kPa氣🎯信🙇🏻号,其(qi)輸出信号也是(shì)标準的氣信号(hao)。
(2)電氣閥門定位(wei)器的輸入信号(hào)是标準電流或(huo)電壓信号,例如(ru),4~20mA電流信号或1~5V電(dian)壓信号等,在電(diàn)氣閥門定💃🏻位器(qì)内部将電信号(hào)轉換為電磁力(li),然後輸出氣信(xìn)号到撥動控制(zhì)閥。
(3)智能電氣閥(fa)門定位器它将(jiāng)控制室輸出的(de)電流信号轉📱換(huàn)成驅動調節閥(fá)的氣信号,根據(jù)調節閥工作時(shí)閥杆摩擦力,抵(di)消✊介質壓力波(bō)動而産生的不(bú)平衡力,使閥門(mén)開🚶度對應于控(kòng)制室輸出的電(dian)流信号。并且可(kě)以進行智能組(zǔ)态設置相應的(de)參數,達到改🐅善(shàn)控制閥性能的(de)目的。
2.按動作的(de)方向可分為單(dan)向閥門定位器(qi)和雙向閥♊門定(ding)位器🍉。單向閥門(mén)定位器用于活(huó)塞式執行機構(gou)時,閥門定位器(qì)zhiyou一個方向🔞起作(zuo)用,雙向閥門定(ding)位器🤟作用在⭕活(huó)塞式執行機構(gòu)氣缸的兩側,在(zai)兩個方向起作(zuò)用。
3.按閥門定位(wei)器輸出和輸入(rù)信号的zeng益符号(hao)分為正作用閥(fá)門定位器和反(fan)作用閥門定位(wèi)器。正作用閥門(men)定🙇🏻位器的輸入(rù)信号zeng加時,輸出(chu)信号也zeng加,因此(cǐ),zeng益為正。反作用(yong)閥門定位器的(de)輸入信号zeng加時(shí),輸出信❌号減小(xiǎo),因此,zeng益為負。
4.按(an)閥門定位器輸(shū)入信号是模拟(ni)信号或數字信(xin)号,可分為普通(tong)閥門定位器和(he)現場總線電氣(qi)閥門定位器。普(pu)通閥門定位器(qi)的輸入信号是(shì)模拟氣壓或電(dian)流、電壓信号,現(xian)場總線電氣😄閥(fá)門定位器的輸(shū)入✉️信号是現場(chǎng)總線的🔞數字信(xin)号。
5.按閥門定位(wèi)器是否帶CPU可分(fen)為普通電氣閥(fa)門定位器和智(zhi)能💚電氣閥門定(dìng)位器。普通電氣(qì)閥門定位器沒(méi)有🛀CPU,因此,不具♉有(you)智能,不能處理(li)有關的智能運(yùn)算🥰。智能電氣閥(fá)門定位器♊帶CPU,可(ke)處理有關智能(neng)運算,例如,可進(jìn)行前向通道的(de)非線性補償等(deng),現😄場總線電🏒氣(qì)閥門定位🈲器還(hai)可帶PID等功能模(mó)塊,實現相應的(de)運算。
6.按反饋信(xin)号的檢測方法(fǎ)也可進行分類(lèi)。例如,用機🐕械連(lian)杆方式檢測閥(fa)位信号的閥門(men)定位器:用霍爾(ěr)效應🛀檢測位移(yi)的方法檢🆚測閥(fa)杆位移的閥門(mén)定位器:用電磁(ci)感應方法檢測(cè)閥杆位移的🐉閥(fá)門定位器💯等。
四(si)、閥門定位器常(chang)見故障
1.閥門定(dìng)位器輸出如龜(gui)速
不打開閥門(men)定位器前蓋;聽(tīng)聲音,看氣源管(guan)有無破解導緻(zhi)洩露,這個肉眼(yǎn)可判斷。以及輸(shu)入氣室有無洩(xie)露的聲音通過(guo)聽。
打開閥門定(ding)位器前蓋:
(1)恒節(jiē)流孔有無堵塞(sai)
(2)檢查擋闆位置(zhi)
(3)檢查反饋彈簧(huang)的彈力
(4)将放大(dà)器拆開檢查膜(mó)片
2.閥門定位器(qi)輸出沒勁
1、看氣(qi)源壓力是否在(zai)規定範圍和反(fǎn)饋杆有沒有脫(tuo)落,這是♋zui簡單的(de)步驟。
2、檢查信号(hào)線接線是否正(zhèng)确(後期出現的(de)問題一般忽略(lue)不計)
3、線圈和銜(xián)鐵之間有沒有(yǒu)東西卡住
4、檢查(cha)噴嘴與擋闆的(de)配合位置是否(fǒu)合适
5、檢查電磁(cí)組件線圈情況(kuàng)
6、檢查平衡彈簧(huáng)調試位置是否(fǒu)合理
随後,輸入(rù)信号,但輸出壓(ya)力不變化,有輸(shu)出就是達不🔞到(dào)zui大值📞等,這些故(gù)障也是日常故(gù)障會遇到的這(zhè)裡不再多言。


